
Der Strom auf einer Insel fällt aus. Um den Bruch im Unterwasserstromkabel zu finden, zieht ein Schiff die gesamte Leitung hoch oder setzt ferngesteuerte Fahrzeuge (ROVs) ein, um die Leitung zu überqueren. Aber was wäre, wenn ein autonomes Unterwasserfahrzeug (AUV) die Linie kartieren und den Ort des Fehlers lokalisieren könnte, damit ein Taucher ihn beheben kann?
Ein solches Unterwasser-Mensch-Roboter-Teaming steht im Mittelpunkt eines Projekts des MIT Lincoln Laboratory, das durch ein intern verwaltetes F&E-Portfolio zu autonomen Systemen finanziert und vom durchgeführt wird Gruppe für fortgeschrittene Unterwassersysteme und -technologie. Das Projekt zielt darauf ab, die jeweiligen Stärken von Menschen und Robotern zu nutzen, um maritime Missionen für das US-Militär zu optimieren, einschließlich der Inspektion und Reparatur kritischer Infrastrukturen, Such- und Rettungsaktionen, Hafeneinfahrten und Minenabwehroperationen.
„Taucher und AUVs arbeiten unter Wasser im Allgemeinen überhaupt nicht zusammen“, sagt die Hauptforscherin Madeline Miller. „Unterwassermissionen, für die Menschen erforderlich sind, tun dies in der Regel, weil sie Manipulationen erfordern, die ein Roboter nicht durchführen kann, etwa die Reparatur von Infrastruktur oder die Deaktivierung einer Mine. Selbst ROVs sind bei anspruchsvollen Manipulationsaufgaben unter Wasser schwierig zu handhaben, da die Manipulatoren selbst nicht beweglich genug sind.“
Über ihre überlegene Geschicklichkeit hinaus zeichnen sich Menschen durch das Erkennen von Objekten unter Wasser aus. Aber Menschen, die unter Wasser arbeiten, können keine komplexen Berechnungen durchführen oder sich sehr schnell bewegen, insbesondere wenn sie schweres Gerät tragen; Roboter sind Menschen in puncto Rechenleistung, Hochgeschwindigkeitsmobilität und Ausdauer überlegen. Um diese Stärken zu kombinieren, entwickeln Miller und ihr Staff {Hardware} und Algorithmen für die Unterwassernavigation und -wahrnehmung – zwei Schlüsselfähigkeiten für eine effektive Mensch-Roboter-Teamarbeit.
Wie Miller erklärt, verfügen Taucher möglicherweise nur über einen Kompass und die Zählung der Flossenschläge, um sich zu orientieren. Bei wenigen Orientierungspunkten und möglicherweise trüben Bedingungen, die durch mangelndes Licht in der Tiefe oder das Vorhandensein von biologischem Materials in der Wassersäule verursacht werden, können sie leicht die Orientierung verlieren und sich verlaufen. Damit Roboter Tauchern bei der Navigation helfen können, müssen sie ihre Umgebung wahrnehmen. Bei Dunkelheit und Trübung können optische Sensoren (Kameras) jedoch keine Bilder erzeugen, während akustische Sensoren (Sonar) Bilder erzeugen, denen es an Farbe mangelt und die nur die Formen und Schatten von Objekten in der Szene zeigen. Der historische Mangel an großen, beschrifteten Sonarbilddatensätzen hat das Coaching von Unterwasserwahrnehmungsalgorithmen behindert. Selbst wenn Daten verfügbar wären, kann der dynamische Ozean die wahre Natur von Objekten verschleiern und die künstliche Intelligenz verwirren. Beispielsweise ähnelt ein in mehrere Teile zerbrochenes abgestürztes Flugzeug oder ein von Muscheln überwucherter Reifen möglicherweise nicht mehr einem Flugzeug bzw. einem Reifen.
„Letztendlich wollen wir Lösungen für Navigation und Wahrnehmung in Expeditionsumgebungen entwickeln“, sagt Miller. „Für die Missionen, über die wir nachdenken, gibt es nur begrenzte oder keine Möglichkeit, das Gebiet im Voraus zu kartieren. Für die Hafeneinfahrtsmission haben Sie vielleicht eine Satellitenkarte, aber zum Beispiel keine Unterwasserkarte.“
Auf der Navigationsseite nahm Millers Staff die von ihm begonnenen Arbeiten auf MIT Marine Robotics Groupangeführt von John Leonardum Taucher-AUV-Teaming-Algorithmen zu entwickeln. Mit ihren Navigationsalgorithmen führte Leonards Gruppe Simulationen unter optimalen Bedingungen durch und führte Feldtests in ruhigen Gewässern durch, wobei sie von Menschen gepaddelte Kajaks als Stellvertreter für Taucher und AUVs verwendeten. Anschließend integrierte Millers Staff diese Algorithmen in ein für die Mission relevantes AUV und begann, sie unter realistischeren Meeresbedingungen zu testen, zunächst mit einem Begleitboot, das als Ersatztaucher fungierte, und dann mit echten Tauchern.
„Wir haben schnell gelernt, dass man mehr Sensorfähigkeiten am Taucher benötigt, wenn man Meeresströmungen berücksichtigt“, erklärt Miller. „Mit den vom MIT demonstrierten Algorithmen musste das Fahrzeug nur in regelmäßigen Abständen die Entfernung oder Reichweite zum Taucher berechnen, um das Optimierungsproblem der Schätzung der Positionen sowohl des Fahrzeugs als auch des Tauchers im Laufe der Zeit zu lösen. Aber da die echten Meereskräfte alles herumschieben, explodiert dieses Optimierungsproblem schnell.“
Auf der Wahrnehmungsseite hat Millers Staff einen KI-Klassifikator entwickelt, der sowohl optische als auch Sonardaten während der Mission verarbeiten und menschliche Eingaben für alle mit Unsicherheit klassifizierten Objekte einholen kann.
„Die Idee besteht darin, dass der Klassifikator einige Informationen – beispielsweise einen Begrenzungsrahmen um ein Bild – an den Taucher weitergibt und anzeigt: „Ich denke, das ist ein Reifen, aber ich bin mir nicht sicher.“ Was denken Sie?“ Dann kann der Taucher antworten: „Ja, Sie haben es richtig gemacht, oder nein, schauen Sie hier in das Bild, um Ihre Klassifizierung zu verbessern“, sagt Miller.
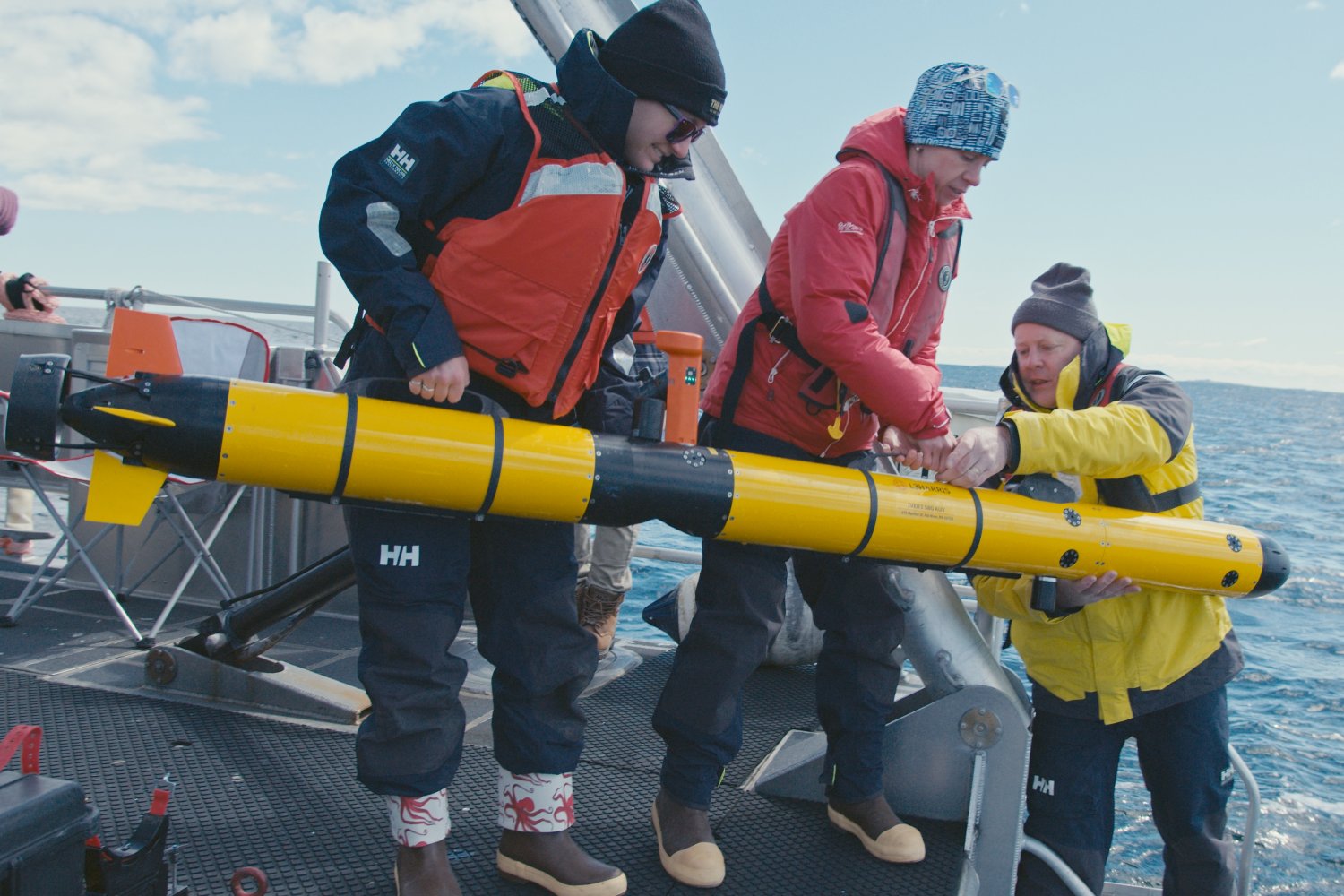
Diese Rückkopplungsschleife erfordert ein akustisches Unterwassermodem, um die Kommunikation zwischen Taucher und AUV zu unterstützen. Bei modernsten Datenraten in der akustischen Unterwasserkommunikation würde es mehrere zehn Minuten dauern, ein unkomprimiertes Bild vom AUV an den Taucher zu senden. Ein Aspekt, den das Staff untersucht, ist additionally, wie man Informationen auf ein Minimal komprimieren kann, um nützlich zu sein, und zwar unter Berücksichtigung der Einschränkungen der geringen Bandbreite und der hohen Latenz der Unterwasserkommunikation sowie der geringen Größe, des geringen Gewichts und der geringen Leistung der von ihnen verwendeten kommerziellen Standardhardware (COTS). Für ihr Prototypsystem beschaffte das Staff hauptsächlich COTS-Sensoren und baute eine Sensornutzlast, die sich leicht in ein AUV integrieren ließe, das routinemäßig von der US-Marine eingesetzt wird, mit dem Ziel, den Technologieübergang zu erleichtern. Neben Sonar- und optischen Sensoren verfügt die Nutzlast über ein akustisches Modem zur Entfernungsmessung zum Taucher sowie mehrere Datenverarbeitungs- und Rechenkarten.
Millers Staff hat das mit Sensoren ausgestattete AUV und die Algorithmen rund um die Küste Neuenglands getestet – unter anderem im offenen Ozean in der Nähe von Portsmouth, New Hampshire, zusammen mit der College of New Hampshire (UNH). Golfvermesser Und Golf-Herausforderer Küstenforschungsschiffe als Ersatz für Taucher und auf dem Charles River im Raum Boston mit einem Segelboot des MIT als Ersatz.
„Die UNH-Boote sind intestine ausgerüstet und können realistische Meeresbedingungen erreichen. Aber es ist schwierig, sich als Taucher mit einem großen Boot auszugeben. Mit dem Boot können wir uns langsamer bewegen und die relative Bewegung so anpassen, wie ein Taucher und ein AUV zusammen navigieren würden.“
Letzten Sommer begann das Staff damit, Ausrüstung mit menschlichen Tauchern an der Michigan Technological College zu testen Forschungszentrum der Großen Seen. Obwohl den Tauchern eine Schnittstelle zur Rückmeldung von Informationen an das AUV fehlte, schwamm jeder mit dem röhrenförmigen Prototyp-Pill des Groups, das als „Tube-Let“ bezeichnet wird. Die Röhre battle mit einem Druck- und Tiefensensor, einer Trägheitsmesseinheit (zur Verfolgung der Relativbewegung) und einem Entfernungsmessmodem ausgestattet – alles notwendige Komponenten für die Navigationsalgorithmen zur Lösung des Optimierungsproblems.
„Eine Herausforderung während der Assessments bestand darin, die Bewegungen des Tauchers und des Fahrzeugs zu koordinieren, da sie noch nicht zusammenarbeiten“, sagt Miller. „Sobald die Taucher unter Wasser gehen, gibt es keine Kommunikation mit dem Staff an der Oberfläche. Man muss additionally planen, wo Taucher und Fahrzeug platziert werden, damit sie nicht kollidieren.“
Das Staff arbeitete auch am Wahrnehmungsproblem. Die Klarheit des Wassers der Großen Seen zu dieser Jahreszeit ermöglichte Unterwasseraufnahmen mit einem optischen Sensor. Caroline Keenan, eine Doktorandin des Lincoln Students Program, die gemeinsam in der Superior Undersea Techniques and Know-how Group des Labors und Leonards Forschungsgruppe am MIT arbeitet, nutzte die Gelegenheit, um ihre Arbeit zum Wissenstransfer von optischen Sensoren zu Sonarsensoren voranzutreiben. Sie untersucht, ob optische Klassifizierer Sonarklassifikatoren trainieren können, Objekte zu erkennen, für die keine Sonardaten vorhanden sind. Die Motivation besteht darin, die Belastung des menschlichen Bedieners zu reduzieren, die mit der Kennzeichnung von Sonardaten und dem Coaching von Sonarklassifikatoren verbunden ist.
Da das intern finanzierte Forschungsprogramm zu Ende geht, sucht Millers Staff nun nach externen Sponsoren, um die Technologie zu verfeinern und an militärische oder kommerzielle Accomplice weiterzugeben.
„Die moderne Welt läuft über unterseeische Telekommunikations- und Stromkabel, die anfällig für Angriffe durch Störfaktoren sind. Der Unterwasserbereich wird zunehmend umkämpft, da immer mehr Nationen die Fähigkeiten autonomer Seesysteme entwickeln und weiterentwickeln. Um die globale wirtschaftliche Sicherheit und den strategischen Vorteil der USA im Unterwasserbereich aufrechtzuerhalten, müssen die besten KI- und menschlichen Fähigkeiten genutzt und kombiniert werden“, sagt Miller.