
Diffusionsmodelle wie Dall-E von OpenAI werden immer nützlicher, um neue Designs zu erlernen. Menschen können diese Systeme dazu veranlassen, ein Bild zu generieren, ein Video zu erstellen oder eine Blaupause zu verfeinern und mit Ideen zurückzukommen, die sie zuvor nicht berücksichtigt hatten.
Aber wussten Sie, dass Modelle für generative künstliche Intelligenz (Genai) auch Fortschritte bei der Erstellung von funktionierenden Robotern machen? Jüngste Diffusionsbasierte Ansätze haben Strukturen und die Systeme erzeugt, die sie von Grund auf neu steuern. Mit oder ohne Eingabe eines Benutzers können diese Modelle neue Designs erstellen und diese dann in der Simulation bewerten, bevor sie hergestellt werden.
Ein neuer Ansatz aus dem MIT-Labor für Informatik und künstliche Intelligenz (CSAIL) wendet dieses generative Know-how zur Verbesserung der Roboterdesigns des Menschen an. Benutzer können ein 3D -Modell eines Roboters entwerfen und angeben, welche Teile sie sehen möchten, die ein Diffusionsmodell modifizieren möchten, wodurch seine Dimensionen im Voraus bereitgestellt werden. Genai Brainstorming dann die optimale Type für diese Bereiche und testet seine Ideen in der Simulation. Wenn das System das richtige Design findet, können Sie einen funktionierenden, realen Roboter mit einem 3D-Drucker speichern und anschließend fördern, ohne zusätzliche Änderungen zu erfordern.
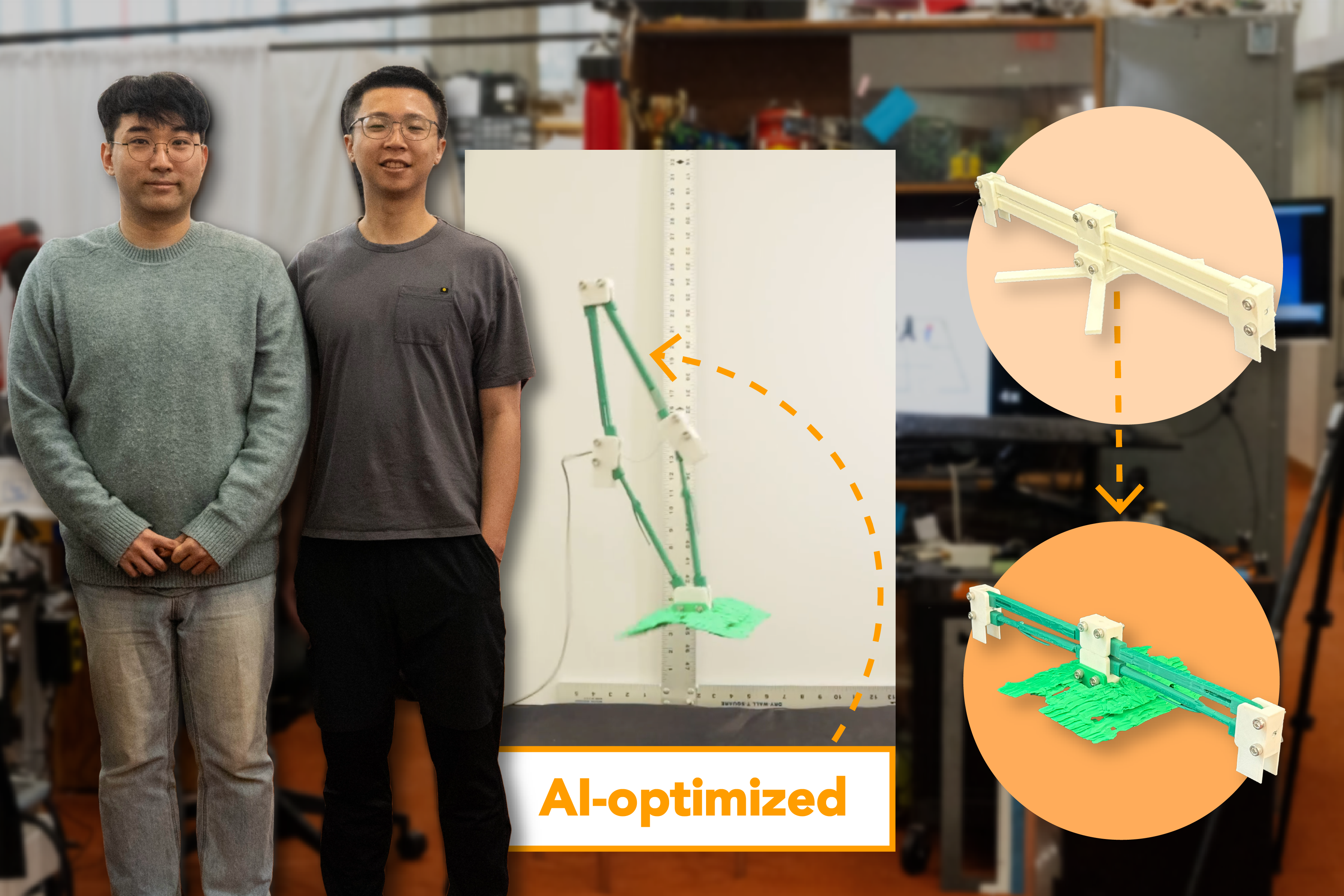
Die Forscher verwendeten diesen Ansatz, um einen Roboter zu erstellen, der durchschnittlich etwa 2 Fuß oder 41 Prozent höher als eine ähnliche Maschine aufspringt, die sie für sich selbst erstellt haben. Die Maschinen sind im Aussehen nahezu identisch: Sie sind beide aus einer Artwork Kunststoff, die Polylinsäure bezeichnet, und während sie zunächst flach aussehen, springen sie in eine Diamantform, wenn ein Motor an der an ihnen angebrachten Schnur zieht. Was genau hat AI anders gemacht?
Ein genauerer Blick zeigt, dass die AI-generierten Verbindungen gekrümmt sind und dicken Trommelstäben ähneln (die Musikinstrumenten-Schlagzeuger verwenden), während die Verbindungsteile des Standardroboters gerade und rechteckig sind.
Immer bessere Blobs
Die Forscher begannen, ihren springenden Roboter zu verfeinern, indem sie 500 potenzielle Designs unter Verwendung eines anfänglichen Einbettungsvektors untersuchten-eine numerische Darstellung, die hochrangige Merkmale erfasst, um die vom KI-Modell erzeugten Designs zu leiten. Daraus wählten sie die High -12 -Optionen basierend auf der Leistung in der Simulation aus und verwendeten sie, um den Einbettungsvektor zu optimieren.
Dieser Vorgang wurde fünfmal wiederholt und leitete das KI -Modell zunehmend, um bessere Designs zu generieren. Das resultierende Design ähnelte einem Blob, sodass die Forscher ihr System dazu veranlassten, den Entwurf für ihren 3D -Modell zu skalieren. Dann stellten sie die Type her und stellten fest, dass sie tatsächlich die Sprungfähigkeiten des Roboters verbesserte.
Der Vorteil der Verwendung von Diffusionsmodellen für diese Aufgabe ist laut Co-Lead-Autor und CSAL-Postdoc Byungchul Kim, dass sie unkonventionelle Lösungen finden können, um Roboter zu verfeinern.
„Wir wollten unsere Maschine höher springen lassen, additionally dachten wir, wir könnten die Hyperlinks einfach so dünn wie möglich machen, um sie leicht zu machen“, sagt Kim. „Eine so dünne Struktur kann jedoch leicht brechen, wenn wir nur 3D -gedrucktes Materials verwenden. Unser Diffusionsmodell hat eine bessere Idee entwickelt, indem wir eine einzigartige Type vorschlagen, die es dem Roboter ermöglichte, mehr Energie zu speichern, bevor sie sprang, ohne die Hyperlinks zu dünn zu machen. Diese Kreativität hat uns geholfen, etwas über die zugrunde liegende Physik der Maschine zu lernen.“
Das Group beauftragte dann sein System mit der Ausarbeitung eines optimierten Fußes, um sicherzustellen, dass es sicher landete. Sie wiederholten den Optimierungsprozess und wählten schließlich das bestmögliche Design, um an der Unterseite ihrer Maschine zu befestigen. Kim und seine Kollegen stellten fest, dass ihre KI-gestaltete Maschine weitaus seltener als ihre Grundlinie fiel, um eine Verbesserung von 84 Prozent zu erreichen.
Die Fähigkeit des Diffusionsmodells, das Springen und Landungsfähigkeiten eines Roboters zu verbessern, deutet darauf hin, dass dies nützlich sein könnte, um die Artwork und Weise zu verbessern, wie andere Maschinen entworfen werden. Beispielsweise könnte ein Unternehmen, das an Fertigungs- oder Haushaltsrobotern arbeitet, einen ähnlichen Ansatz verwenden, um seine Prototypen zu verbessern, und spart den Ingenieuren, die normalerweise für die Iterierung dieser Änderungen vorbehalten sind.
Das Gleichgewicht hinter dem Sprung
Um einen Roboter zu schaffen, der hoch springen und stabil landen könnte, erkannten die Forscher, dass sie ein Gleichgewicht zwischen beiden Toren erreichen mussten. Sie repräsentierten sowohl die Sprunghöhe als auch die Landungserfolgsrate als numerische Daten und schulten dann ihr System, um einen Candy Spot zwischen beiden Einbettungsvektoren zu finden, die dazu beitragen könnten, eine optimale 3D -Struktur aufzubauen.
Die Forscher stellen fest, dass dieser AI-unterstützte Roboter, während er sein von Menschen entworfener Gegenstück übertraf, aber bald noch größere neue Höhen erreichen könnte. Diese Iteration beinhaltete die Verwendung von Materialien, die mit einem 3D -Drucker kompatibel waren, aber zukünftige Versionen würden mit leichteren Materialien noch höher springen.
Der Co-LEAD-Autor und MIT CSAIL-Doktorand Tsun-Hsuan „Johnson“ Wang sagt, das Projekt sei ein Ausgangspunkt für neue Robotikdesigns, bei denen generative KI helfen könnte.
„Wir wollen uns auf flexiblere Ziele verzweigen“, sagt Wang. „Stellen Sie sich vor, Sie verwenden eine natürliche Sprache, um ein Diffusionsmodell zu leiten, um einen Roboter zu entwerfen, der einen Becher abholen kann, oder einen elektrischen Bohrer betreiben.“
Kim sagt, dass ein Diffusionsmodell auch dazu beitragen könnte, Artikulation zu erzeugen und zu ideieren, wie sich Teile verbinden, und möglicherweise zu verbessern, wie hoch der Roboter springen würde. Das Group untersucht auch die Möglichkeit, mehr Motoren hinzuzufügen, um zu steuern, in welche Richtung die Maschine springt, und möglicherweise ihre Landungsstabilität zu verbessern.
Die Arbeit der Forscher wurde zum Teil von den aufstrebenden Grenzen der Nationwide Science Basis im Forschungs- und Innovationsprogramm, der Singapore-MIT Alliance for Analysis and Expertise MENS, Manus and Machina-Programm sowie dem Gwangju Institute of Science and Expertise (GIST) -Csail-Zusammenarbeit unterstützt. Sie präsentierten ihre Arbeiten auf der Internationalen Konferenz 2025 über Robotik und Automatisierung.